Biography
I am a PhD candidate in the Mechanical and Automation Engineering department at The Chinese University of Hong Kong. My research focuses on unmanned aerial vehicles (UAVs), specifically in the areas of collision-resilient UAV, safety-aware motion planning, and UAV model predictive control. I am passionate about designing and implementing algorithms and hardware systems that enhance the intelligence and resilience of UAVs in real-world applications.
Interests
- Engineering Education
- Robot System Design
- Control & Planning
Education
PhD in Mechanical and Automation Engineering, 2025
The Chinese University of Hong Kong
BSc in Information Engineering, 2021
Nanjing University of Aeronautics and Astronautics
Publications
Quickly discover relevant content by filtering publications.
(2024).
Air Bumper: A Collision Detection and Reaction Framework for Autonomous MAV Navigation.
2024 IEEE International Conference on Robotics and Automation (ICRA).
(2024).
A Self-Evolving Digital Twin System Architecture for Indoor UAV Management based on Online Deep Learning.
2024 IEEE International Conference on Robotics and Biomimetics (ROBIO).
(2024).
Synergistic Temporal Logic Planning for an Aerial Gripper.
2024 IEEE International Conference on Robotics and Biomimetics (ROBIO).
(2023).
An interactive system for multiple-task linear temporal logic path planning.
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
(2023).
Sampling-based path planning under temporal logic constraints with real-time adaptation.
2023 IEEE International Conference on Robotics and Automation (ICRA).
Projects
*
This project presents a fully autonomous drone-based inspection for the ceiling of a standard swimming pool.
This project presents an autonomous indoor drone inspection system with a novel GPU-accelerated mapping algorithm and an AI-based Building Information Modeling method.
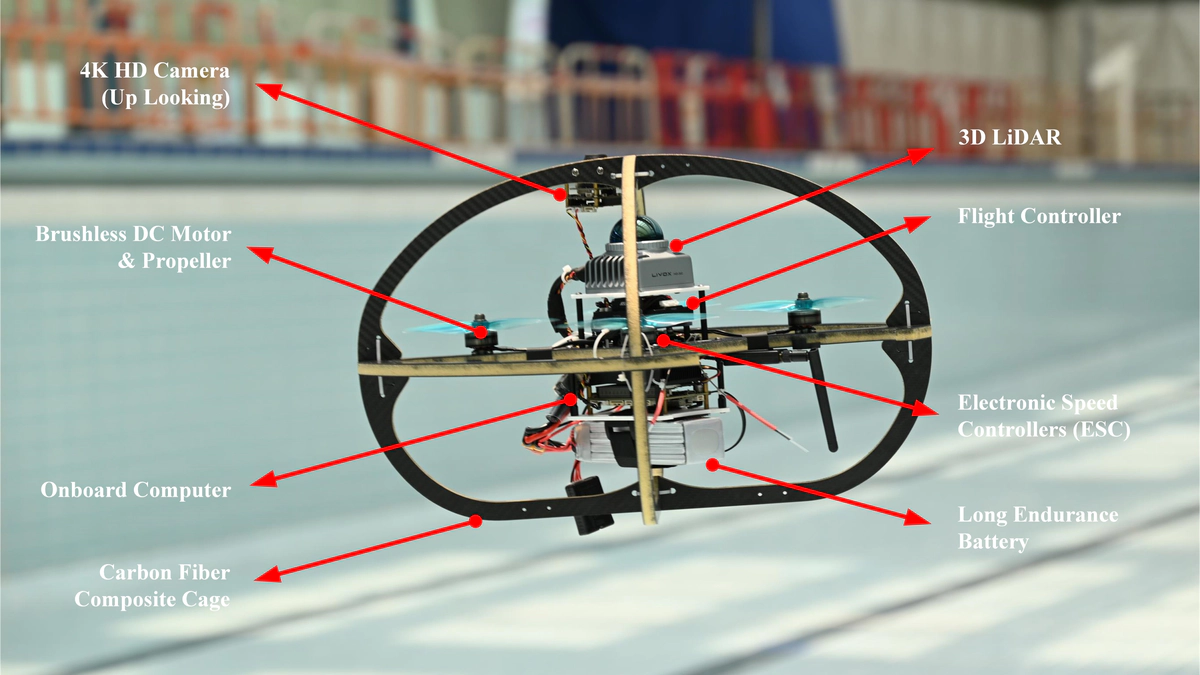
This project presents the design of a collision-resilient UAV with 3D LiDAR and an onboard computer for autonomous drone tasks, such as search-and-rescue, exploration, and inspection.